Newton’s 2nd Law
\[F=ma\]
Thanks for tuning in.
But seriously…
This is the typical starting point for anyone writing down the 2nd law of motion. But it’s just not what it is.
The version written above is a special case. Firstly, acceleration \(a\) is a vector, so we should writhe \(\vec{a}\) instead of \(a\). If our analysis is one dimensional - then we can reduce \(\vec{a}\) to \(a\), but in general it is a vector quantity as a vector can be one dimensions - or however many dimensions you like.
Secondly, Newton wasn’t thinking about acceleration of a fixed mass - rather he was thinking about how momentum changes with time. His original formulation was \[\vec{F}=\frac{d\vec{p}}{dt},\]
where \(\vec{p}\) is momentum, defined as: \[\vec{p}=m\vec{v},\]
and \(\vec{F}\) is the total external force acting upon a system. So a total force \(\vec{F}\) causes a change in momentum \(\vec{p}\) with respect to time \(t\) - and an observed change in momentum can be related to a total force \(\vec{F}\) acting on the system.
In the absence of external forces, \(\vec{F}=0\), momentum is conserved, i.e. \(\frac{d\vec{p}}{dt}=0\) - i.e. it does not change with time.
A conserved quantity in physics is gold - as it allows us to relate two states of a system without knowing the details of how the system got from one state to another, since (in this case) the momentum is the same at both states. Another key conserved quantity is energy \(E\).
Since mass \(m\) is a scalar, and velocity \(\vec{v}\) is a vector, the momentum is a scaled velocity vector, i.e. it has the same direction as velocity, but its magnitude is scaled by mass.
The general form
Carrying out the differentiation using the product rule gives:
\[\vec{F}=\frac{d(m\vec{v})}{dt}=m\frac{d\vec{v}}{dt}+\vec{v}\frac{dm}{dt}.\]
What we typically do is consider mass to be constant, so the second term vanishes to \(dm/dt=0\), leaving us with:
\[\vec{F}=m\frac{d\vec{v}}{dt}=m\vec{a},\]
where \(\frac{d\vec{v}}{dt}=\vec{a}\) is acceleration, the change in velocity with time. This is our familiar form of the 2nd law of motion.
So our typical form is just a special case of the more general form.
Because this is a vector equation, it encodes quite alot of information. If our problem is one dimensions, this reduces to a scalar equation (one equation). For two dimensions, the vector equation encodes two scalar equations (one for each component), and in three dimensions it encodes three scalar equations.
Why does this matter?
In many practical applications, the mass of the system is not constant with respect to time.
Anyone who has studied fluid mechanics or rocket propulsion will be familiar with the more general form, where mass is not constant with respect to time. In rockets, mass is expelled (the propellant) and in fluid dynamics mass flow in a control volume is variable with time. However, for rockets, the general form needs to be used with care while considering relative velocities. Starting out with a scalar \(F=ma\) in those fields will not get you very far.
Embracing first principles
I’ve always tried to keep in mind the first principles of physics. Newton’s laws are exactly that - first principles. They are not just equations to be memorized, but rather they are the foundation upon which we build our understanding of mechanics.
When we start with the more general form of Newton’s 2nd law, we are reminded that forces cause changes in momentum, and that momentum can change not only due to changes in velocity but also due to changes in mass. This broader perspective is crucial for understanding a wide range of physical phenomena.
Instead of starting half way down the road with \(F=ma\), starting with \(\vec{F}=d\vec{p}/dt\) and then performing acceptable adjustments or simplifacations to the problem at hand keeps us grounded in the fundamental concepts of physics and encourages us to think more deeply about the systems we are analyzing. It does not cost anything extra to remember the more general form, and it pays off in the long run.
Deriving the rocket equation
Let’s develop the equation of motion for a rocket in one dimension. We start with the general form
\[\vec{F} = \frac{d\vec{p}}{dt} = m\vec{a} + \frac{dm}{dt}\vec{v}.\]
Every rocket, regardless of the actual propulsion device, generates thrust by expelling mass. The \(dm/dt\) term is therefore important for thrust. There is however a problem with this formulation - without additional context. A stationary rocket (\(v=0\)) can generate thrust by expelling mass \(dm/dt<0\). However, that term vanishes at time \(t=0\) if \(\vec{v}(0)=\vec{0}\).
We need to clarify that \(\vec{v}=\vec{v}(t)\) in the above formulation is the velocity of the expelled mass relative to the rocket. Let’s call that velocity \(\vec{V}_e\), which has direction opposite the rocket’s velocity vector \(\vec{v}\),
\[\vec{F} = m\vec{a} - \frac{dm}{dt}\vec{V}_e.\]
In the absence of the atmosphere, we can ignore aerodynamic drag. However, to allow for it, we’ll leave the external force component \(F\) in the equation, to yield after rearranging.
As we are in one dimenson, we can drop the vector notation,
\[F = ma - \frac{dm}{dt}V_e.\]
Since the term \(\frac{dm}{dt}V_e\) is thrust (a force), we can rearrange the terms to obtain
\[F + \frac{dm}{dt}V_e = ma.\]
As \(dm/dt<0\) and \(V_e<0\) the thrust term is positive - which makes sense. Increased thrust should yield an increase in acceleration \(a\) for a given mass \(m\).
It is understandable that this derivation leaves some questions unanswered. In particular, consider that we have the acceleration term of the rocket \(\vec{a}=\vec{a}(t)\) in an inertial frame of reference, but the thrust component has a velocity \(\vec{V}_e\) which is observed in the rocket’s frame of reference. How does that make sense?
A deeper dive into the rocket equation
Consider the following two states of the rocket, one at time \(t\) before a mass \(dm\) is expelled, and one a short time interval \(dt\) after.
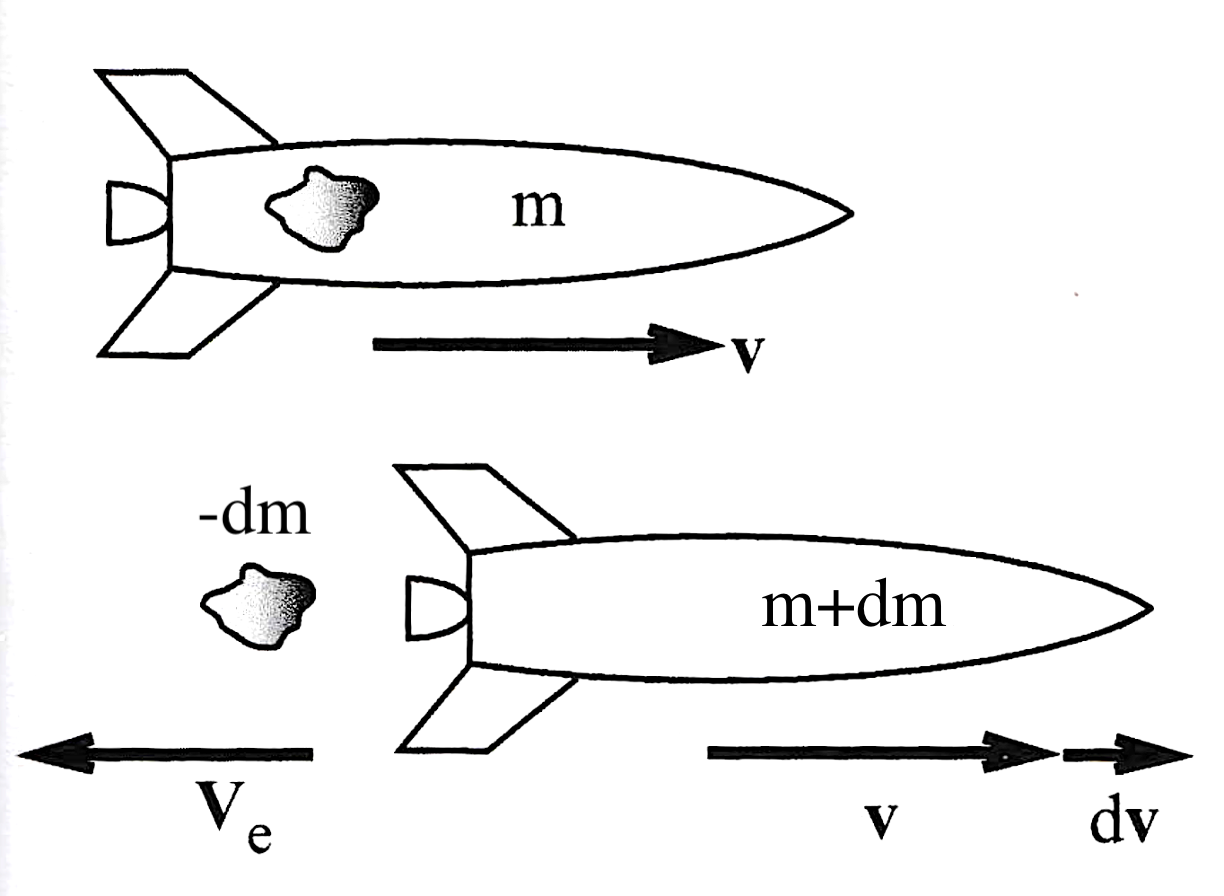
The quantity \(dm\) is the change in rocket mass, which is negative. The mass of the expelled fuel is therefore -dm.
The differential change in momentum \(dp\) between these two different points in time is
\[ \begin{aligned} p(t+dt) - p(t) &= -dm (\vec{v}+\vec{V}_e) + (m-dm)(\vec{v}+d\vec{v}) - m\vec{v}\\ &= -dm (\vec{v}+\vec{V}_e-\vec{v}-d\vec{v}) + m\vec{v} - m\vec{v} - md\vec{v}\\ &= -dm \vec{V}_e - \underbrace{(dm)(d\vec{v})}_{\approx 0} + md\vec{v}\\ &= -dm \vec{V}_e + md\vec{v}. \end{aligned} \]
Keep in mind that the inertial velocity vector of the exhaust mass \(dm\) is \(\vec{v}+\vec{V}_e\), while \(\vec{V}_e\) is the exhaust velocity vector relative to the rocket (accelerating frame of reference).
The second order differential component \(dmd\vec{v}\) is much smaller than other components, and is thus taken to be zero.
We have now set up a finite difference in momentum \(\Delta \vec{p}\) between these two points in time. Dividing both sides by \(\Delta t\) and taking the limit as \(t \to 0\) yields
\[ \begin{aligned} \frac{d\vec{p}}{dt} &= m\frac{d\vec{v}}{dt} - \frac{dm}{dt}\vec{V}_e\\ &= m\vec{a} - \frac{dm}{dt}\vec{V}_e. \end{aligned} \]
As before, we can drop the vector notation,
\[F = ma - \frac{dm}{dt}V_e,\]
and finally rearrange to
\[F + \frac{dm}{dt}V_e = ma.\]
Keep in mind that \(dm/dt < 0\) and \(V_e<0\), so the thrust term is positive.
What does this demonstrate
This derivation shows that even starting with the general form of
\[F = \frac{dp}{dt} = ma + \frac{dm}{dt}v,\]
can even be a step to far in some cases.
For the rocket, considering \(\vec{p}=m\vec{v}\) and taking its time derivative is not a representative model of the rocket’s change in momentum with time.
We should have started with \(dp/dt\) and derived that relation and then relate it to any external forces with the 2nd law - as was shown above.
A tangent - mass and the 2nd law in other contexts
Let’s venture off on a tangent from this topic and consider mass in other contexts.
In simple terms, mass is a measure of inertia. Inertia is the resistance of an object to change in its state of motion. The greater the mass, the greater the inertia, and the more force is required to change its momentum.
Contrast this to a large corporation. A large corporation has a lot of inertia - it is resistant to change. Changing the direction of a large corporation requires significant effort and resources, much like changing the momentum of a massive object requires a large force. It is much easier to change the direction of a small startup company (low mass) than a large multinational corporation (high mass).
However, the mass of a corporation is not fixed. Mergers, acquisitions, layoffs, and growth can all change the “mass” of a corporation over time. This is analogous to the variable mass scenarios in physics where the mass of a system changes with time. However, in this context, these changes with time are not continuous, so the function \(m(t)\) is not differentiable everywhere.
Parkinson’s Law - the mass of bureaucracy
Parkinson’s Law states that “work expands to fill the time available for its completion.” In the context of a corporation, this can be interpreted as the tendency for bureaucratic processes to grow in complexity and size over time, regardless of the actual workload. This growth in bureaucracy can be seen as an increase in the “mass” of the corporation, making it more resistant to change and less agile.
This means that the change in mass of government - and thus of its inertia - is always increasing with time, i.e. \(dm/dt>0\) always. As such, considering it at moving at constant velocity at a given time (\(d\vec{v}/dt=0\)), the magnitude of the force needed to make any change also increases with time \(\left|{d\vec{F}/dt}\right|>0\). In other words, it just gets harder and harder with time to notice any impact of changes made, or a lot more effort has to be expelled for a unit change to be observed. This is an interesting contrast to physical systems where mass can both increase and decrease with time.
However, I have worked in companies that display a chronic beurocratic bloat, where the mass seems to increase without bound. In such cases, the corporation becomes so massive and inertial that it is nearly impossible to change its direction or adapt to new circumstances. So this is not limited to just government…